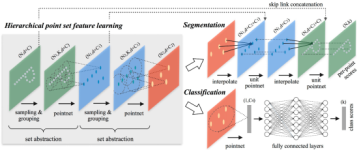
点云深度学习--制作自己的PointConv数据集modelnet-40一、论文及程序地址二、运行环境三、生成PCD文件四、将PCD文件修改为符合规范的txt文件五、将生成的数据放进至源数据集六、实验验证 一、论文及程序地址 论文...
”点云库 数据集“ 的搜索结果

斯坦福大学点云数据集 点云库学习必备
三维点云处理经典数据集+斯坦福兔子PCD+PLY格式,也可以联系我白嫖。哈哈
网上看到的和自已使用的一些开源点云数据集整理汇总
它涉及将个性化的点云数据集分为不同的类别,例如汽车、人或建筑物等。 适用人群: 本项目适用于对深度学习、点云处理和分类预测感兴趣的计算机科学、人工智能研究人员以及学生。 使用场景及目标: 点云数据处理...
0.斯坦福大学的3D扫描存储库:是初学者用的比较多的数据集,模型居多; 1.悉尼城市目标数据集:扫描的常见城市道路对象,包括车辆,行人,树木等; 2.ASL 数据集:数据类型比较多,目标检测和点云配准的都有; 3....
建置状态 Entwine是用于大规模点云的数据组织库,旨在征服数千亿个点以及桌面规模的点云的数据集。 Entwine可以索引可读的任何内容,并且可以读/写各种源,例如S3或Dropbox。 构建是完全无损的,因此即使对于TB级的...
激光点云常用数据集整理
标签: dataset



13、麻省理工(城市大规模数据)7、虚拟地形项目(gis相关)15、ShapeNet数据集。4、佐治亚理工大学扫描库。8、慕尼黑工业大学数据集。9、伯克利3D对象数据集。5、ALS机载激光雷达。6、数字米开朗琪罗项目。2、pcl的...

首先,你需要安装PCL库并配置好环境。接着,你可以通过以下步骤读取数据集生成点云数据: 1. 选择一个数据集,如KITTI Vision Benchmark Suite,下载并解压缩...以上就是通过PCL点云库读取数据集生成点云数据的步骤。
根据语义或实例分割的结果可视化KITTI数据集点云,为不同类别或不同的实例赋予不同的颜色,适合论文作图

PCL(点云库)_百度百科PCL(Point Cloud Library)是在吸收了前人点云相关研究基础上建立起来的大型跨平台开源C++编程库,它实现了大量点云相关的通用算法和高效数据结构,涉及到点云获取、滤波、分割、配准、检索...

本文方法与常见的图像配准...因其简洁性,这里暂且把其称作点云配准的Benchmark。因作者源码中复杂的(四元数, 旋转矩阵, 欧拉角之间)的变换操作和冗余性,且其PyTorch版本的不完整性(缺少评估模型等,最近又更新了),
通过使用本地便携式SQLite数据库,它可以获取以XYZ文本文件形式给出的3D点云数据集(可能包括每个点的RGB颜色信息),并生成3DTiles点云,以使用Cesium WebGL Digital Globe进行交互式3D查看。 该工具能够生成多个...

Laslib VS2013工程,可以自己编译Win32或者x64的debug或者release,运行编译即可,可生成动态链接库和静态库

软件、开源库、数据库
SensatUrban是一个公开的点云数据集,提供了丰富的城市环境中的点云数据,为研究人员和开发者们提供了宝贵的资源。总之,SensatUrban是一个丰富的点云数据集,为研究人员和开发者们提供了宝贵的资源。
推荐文章
- withRouter,非根组件获取路由参数_withrouter 只能取到路由中的一个参数-程序员宅基地
- ubuntu环境下QT5操作摄像头报错,cannot find -lpulse-mainloop-glib cannot find -lpulse cannot find -lglib-2.0_cannot find–lpulse-程序员宅基地
- 用jbpm_bpel学jwsdp的ant方式使用-程序员宅基地
- 输入数字判断星期几_html获取当前星期几-程序员宅基地
- SpringBoot整合Activiti7——实战之放假流程(会签)_activit7中会签-程序员宅基地
- 阿里云服务器收到挖矿病毒的攻击,导致基础的文件被病毒污染的问题和对应的处理解决方法-程序员宅基地
- 北京东城区空调维修办法,格力变频空调出现ph,到底是怎么回事?_格力变频空调ph代码-程序员宅基地
- vscode编辑器使用拓展插件background添加背景图片改变外观_background vscode-程序员宅基地
- android 简单打电话程序_android拨打电话的程序-程序员宅基地
- 第二届中国(泰州)国际装备高层次人才创新创业大赛_泰州市双创人才计划2022-程序员宅基地